




MODULE ĐIỀU KHIỂN ĐỘNG CƠ TB6612 TB6612FNG
- Kho hàng: Còn hàng
- Thương hiệu: Chính hãng
45.000₫
MODULE ĐIỀU KHIỂN ĐỘNG CƠ TB6612 TB6612FNG
THÔNG SỐ KỸ THUẬT :
- Điện áp cung cấp: 2.7 ~ 5.5V DC.
- Driver hỗ trợ 2 cầu H có thể dùng cho hai động cơ DC hoặc một động cơ bước.
- Điện áp cung cấp cho motor: giới hạn ở mức 15V DC.
- Tần số hoạt động lên đến 100KHz.
- Dòng điện ngõ ra max: 3.2A cho mỗi cầu.
- Dòng ngõ ra liên tục: 1.2A cho mỗi cầu (có thể mắc song song để lên đến 2.4A).
- 4 chế độ điều khiển: quay thuận, quay ngược, hãm, stop.
- Bảo vệ quá nhiệt và quá áp.
- Tụ lọc ở cả 2 ngõ cấp nguồn.
- Bảo vệ chống ngược nguồn cấp cho motor.
ỨNG DỤNG :
Mạch Điều Khiển 2 Động Cơ TB6612FNG 1A dùng để điều khiển hai động cơ DC hoặc một động cơ bước với dòng điện liên tục ở 1.2A (đạt đỉnh 3.2A). Hai tín hiệu ngõ vào có thể sử dụng để điều khiển motor ở 4 chế độ khác nhau như quay thuận, quay ngược, hãm, stop. Hai motor có thể điều khiển riêng biệt, tốc độ mỗi motor được điều khiển qua tín hiệu PWM với tần số lên đến 100KHz.
SƠ ĐỒ KẾT NỐI :
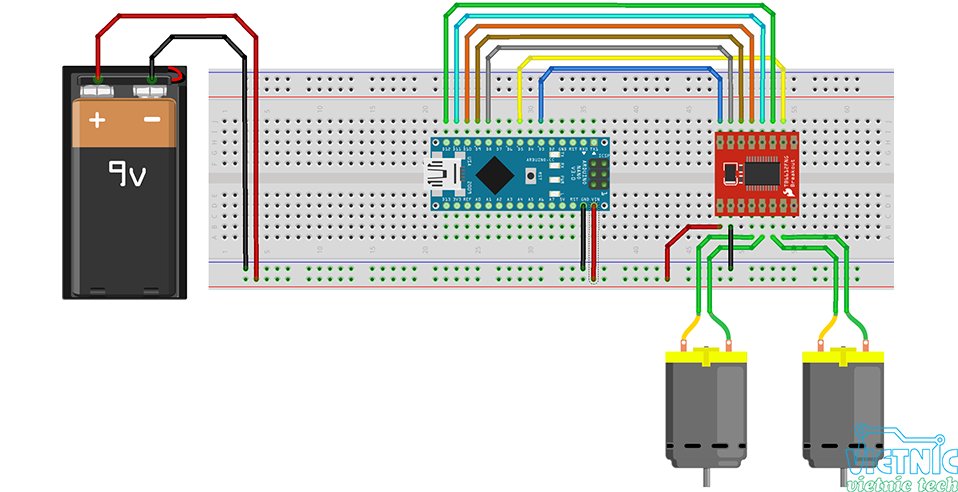
CODE MẪU :
//motor A connected between A01 and A02
//motor B connected between B01 and B02
int STBY = 10; //standby
//Motor A
int PWMA = 3; //Speed control
int AIN1 = 9; //Direction
int AIN2 = 8; //Direction
//Motor B
int PWMB = 5; //Speed control
int BIN1 = 11; //Direction
int BIN2 = 12; //Direction
void setup() {
pinMode(STBY, OUTPUT);
pinMode(PWMA, OUTPUT);
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
pinMode(PWMB, OUTPUT);
pinMode(BIN1, OUTPUT);
pinMode(BIN2, OUTPUT);
}
void loop() {
move(1, 255, 1); //motor 1, full speed, left
move(2, 255, 1); //motor 2, full speed, left
delay(1000); //go for 1 second
stop(); //stop
delay(250); //hold for 250ms until move again
move(1, 128, 0); //motor 1, half speed, right
move(2, 128, 0); //motor 2, half speed, right
delay(1000);
stop();
delay(250);
}
void move(int motor, int speed, int direction) {
//Move specific motor at speed and direction
//motor: 0 for B 1 for A
//speed: 0 is off, and 255 is full speed
//direction: 0 clockwise, 1 counter-clockwise
digitalWrite(STBY, HIGH); //disable standby
boolean inPin1 = LOW;
boolean inPin2 = HIGH;
if (direction == 1) {
inPin1 = HIGH;
inPin2 = LOW;
}
if (motor == 1) {
digitalWrite(AIN1, inPin1);
digitalWrite(AIN2, inPin2);
analogWrite(PWMA, speed);
} else {
digitalWrite(BIN1, inPin1);
digitalWrite(BIN2, inPin2);
analogWrite(PWMB, speed);
}
}
void stop() {
//enable standby
digitalWrite(STBY, LOW);
}
☼ Linh kiện điện tử vietnic. Cung cấp các loại mạch Arduino như Arduino Uno R3, Arduino Mega2560, Arduino nano, Arduino Promini, Board phát triển Arduino, KIT học tập Arduino, KIT phát triển, Module cảm biến, Board mạch IoT, Phụ kiện Arduino, Robotics, module chuyển mạch...
☼ Cung cấp linh kiện điện tử, board mạch thí nghiệm, KIT arduino cho giáo dục, học tập, cơ sở sản xuất, nghiên cứu và thí nghiệm
☼ Đặt hàng các loại linh kiện, module theo yêu cầu
Sửa biến tần ABB | Sửa biến tần Schneider | Sửa biến tần Siemens | Sửa biến tần Danfoss | Sửa biến tần Yakawa | Sửa biến tần LS | Sửa biến tần INVT | Sửa biến tần Fuji | Sửa biến tần Emerson | Sửa biến tần Delta | Sửa biến tần Inovance | Sửa biến tần Hitachi | Sửa biến tần Delixi | Sửa biến tần Best | Sửa biến tần Sanch | Sửa biến tần Allen Bradley AB | Sửa biến tần KEB |
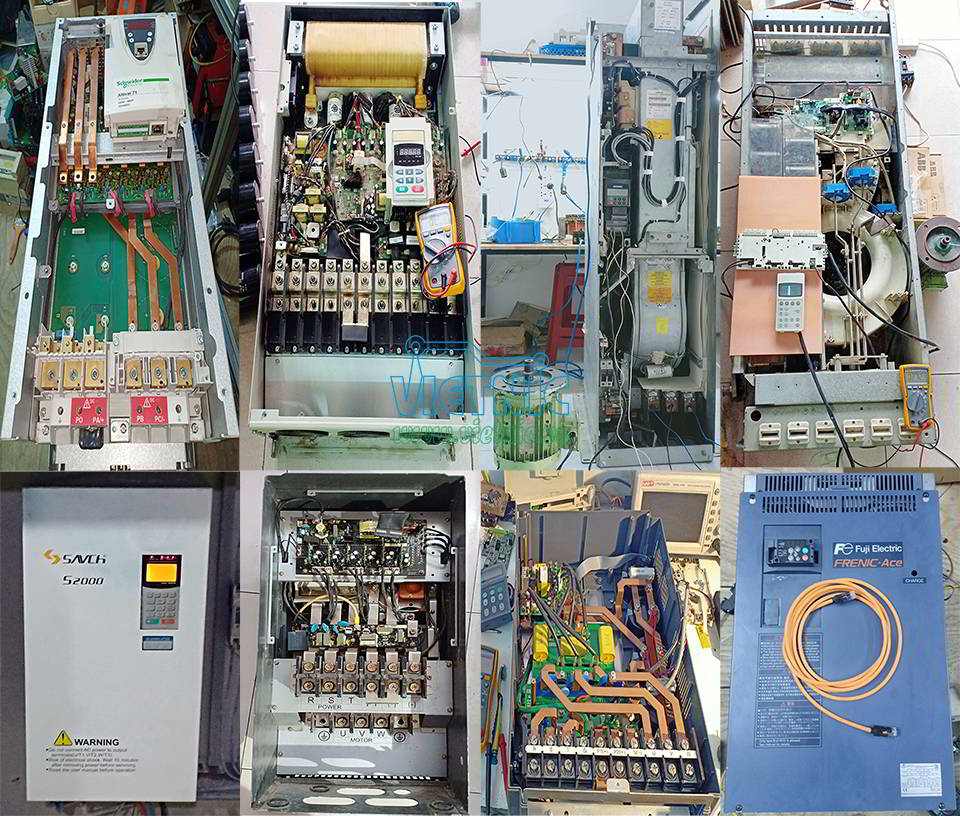
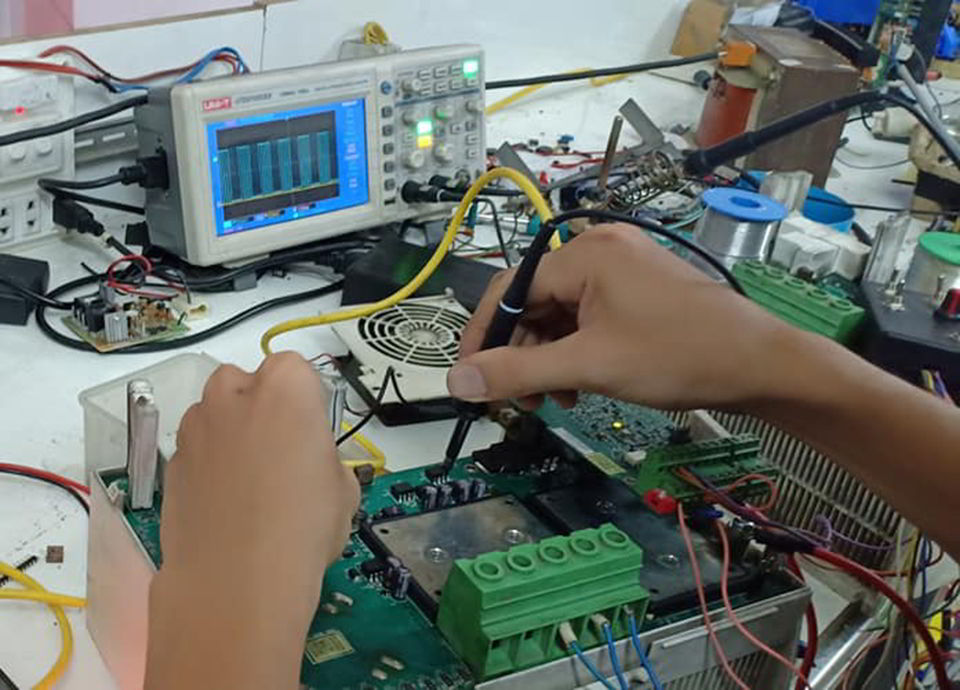
SỬA CHỮA BIẾN TẦN

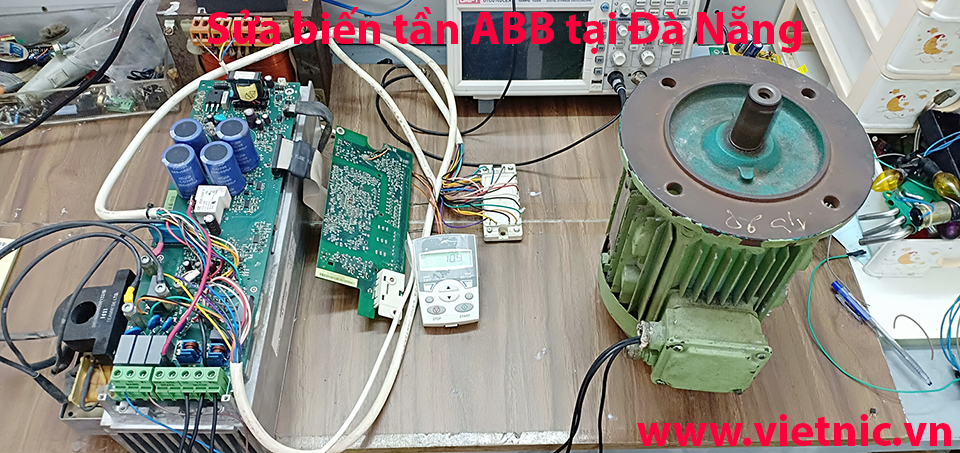
SỬA CHỮA BIẾN TẦN TẠI ĐÀ NẴNG
Sửa chữa biến tần ABB, Sửa chữa Biến tần Siemens, Biến tần Emersons, Biến tần Sneijder, Biến tần Yaskawa, Sữa chữa Biến tần LS, Sữa chữa biến tần Delta, Sữa chữa Biến tần INVT, Biến tần Lenze, Biến tần Fuji và các dòng biến tần như Biến tần Yolico, Biến tần Nowforever..........
- Sửa chữa biến tần lỗi nguồn, lỗi quá áp, lỗi quá dòng
- Sửa chữa biến tần lỗi lệch pha, hỏng công suất
- Cài đặt biến tần theo yêu cầu
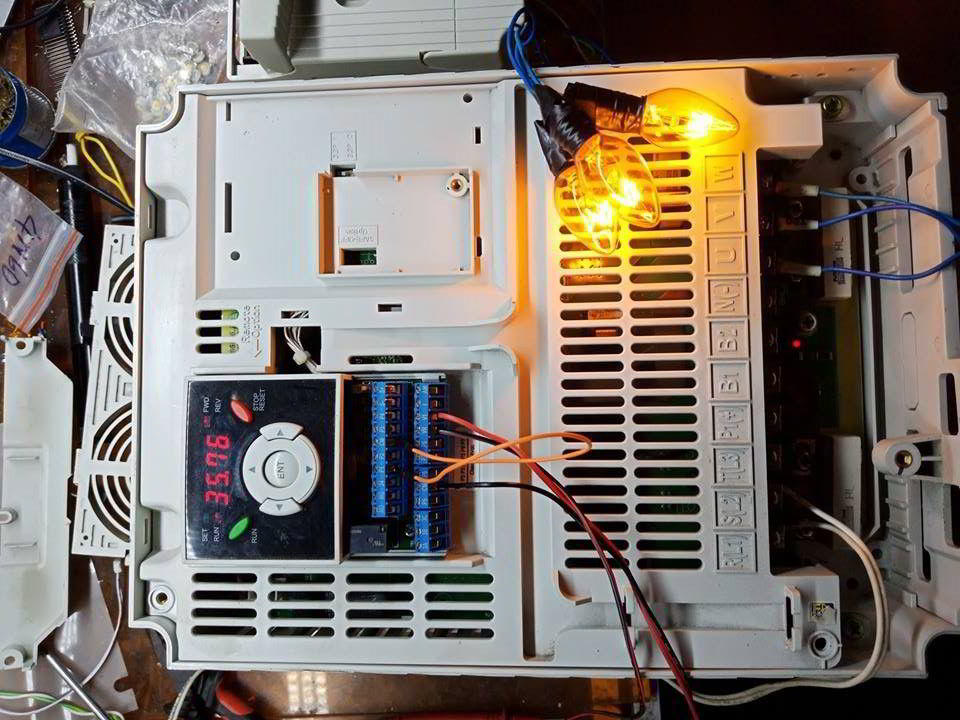
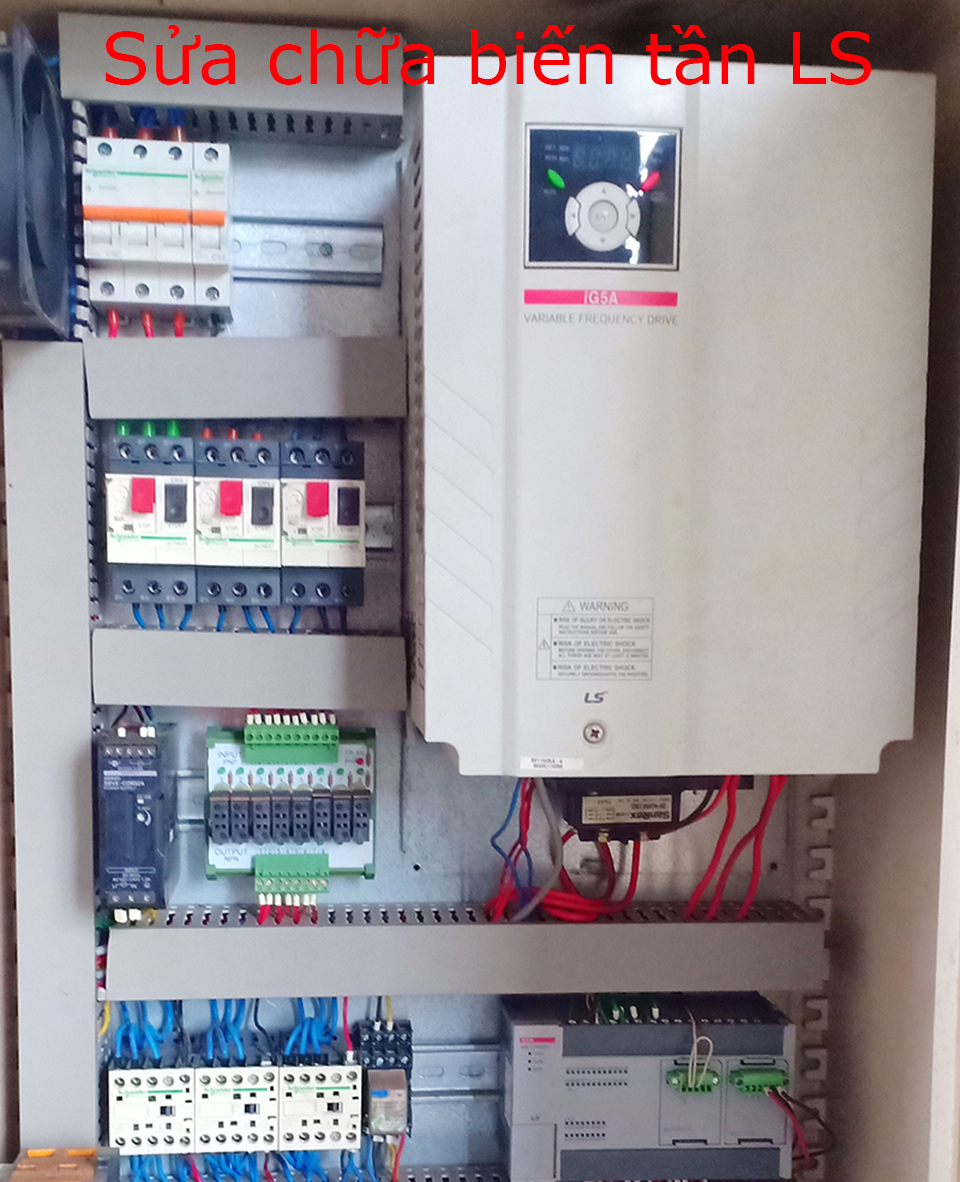
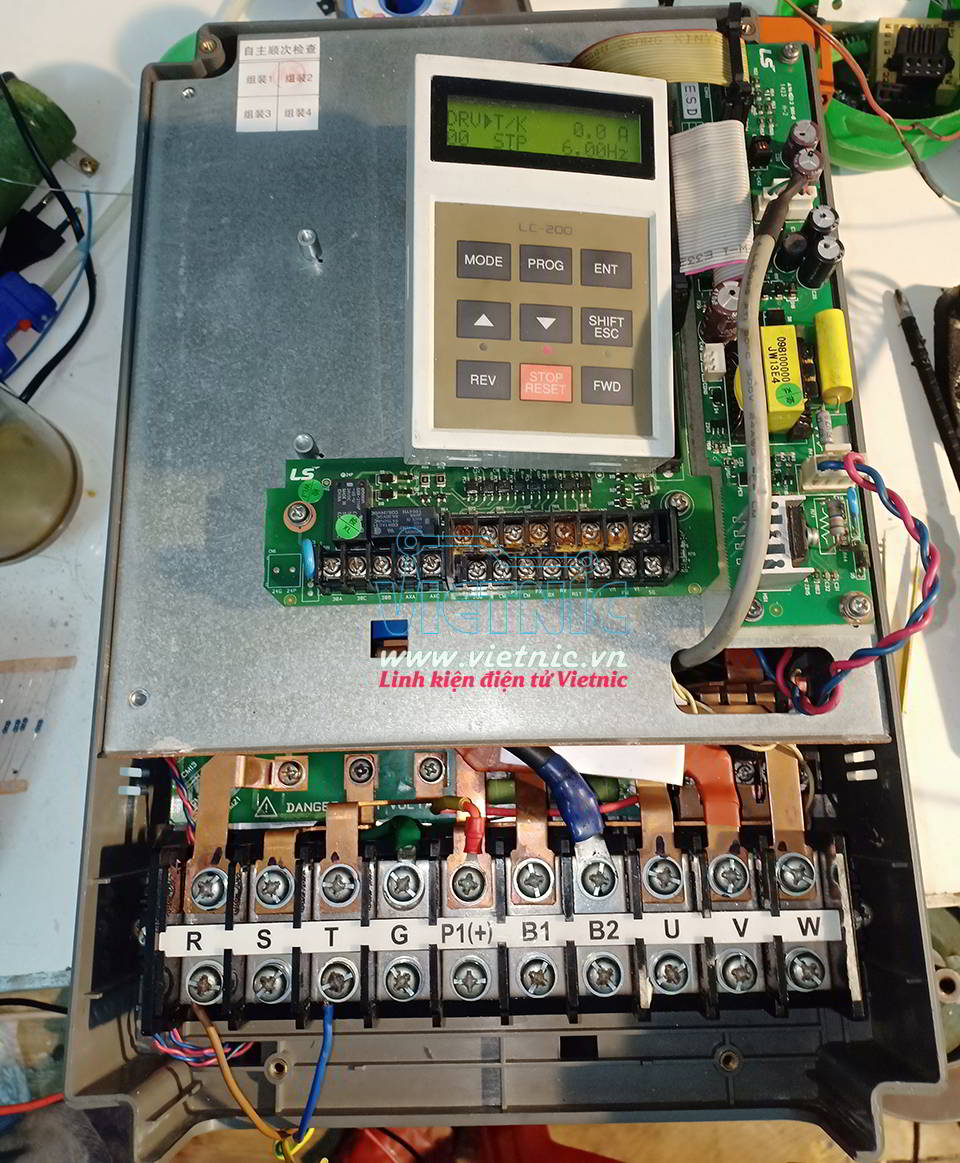
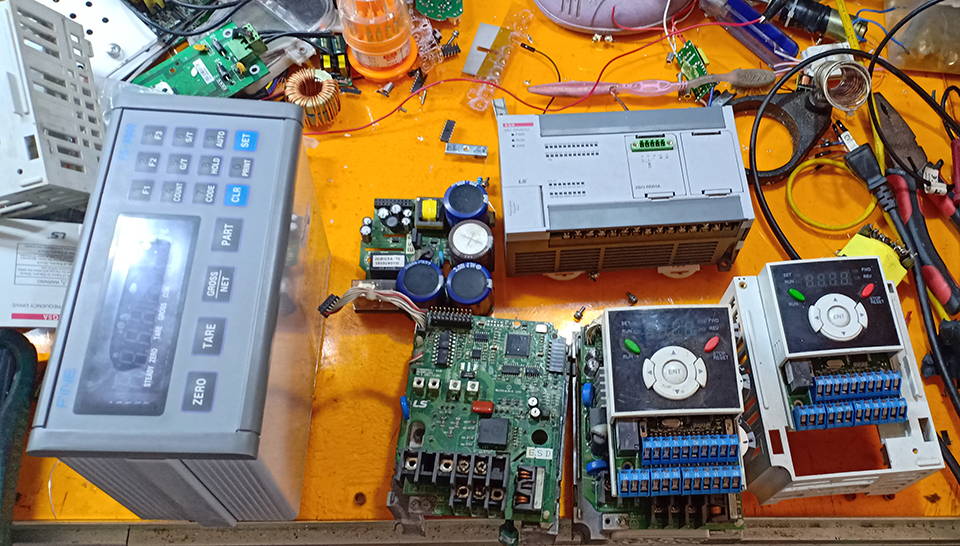
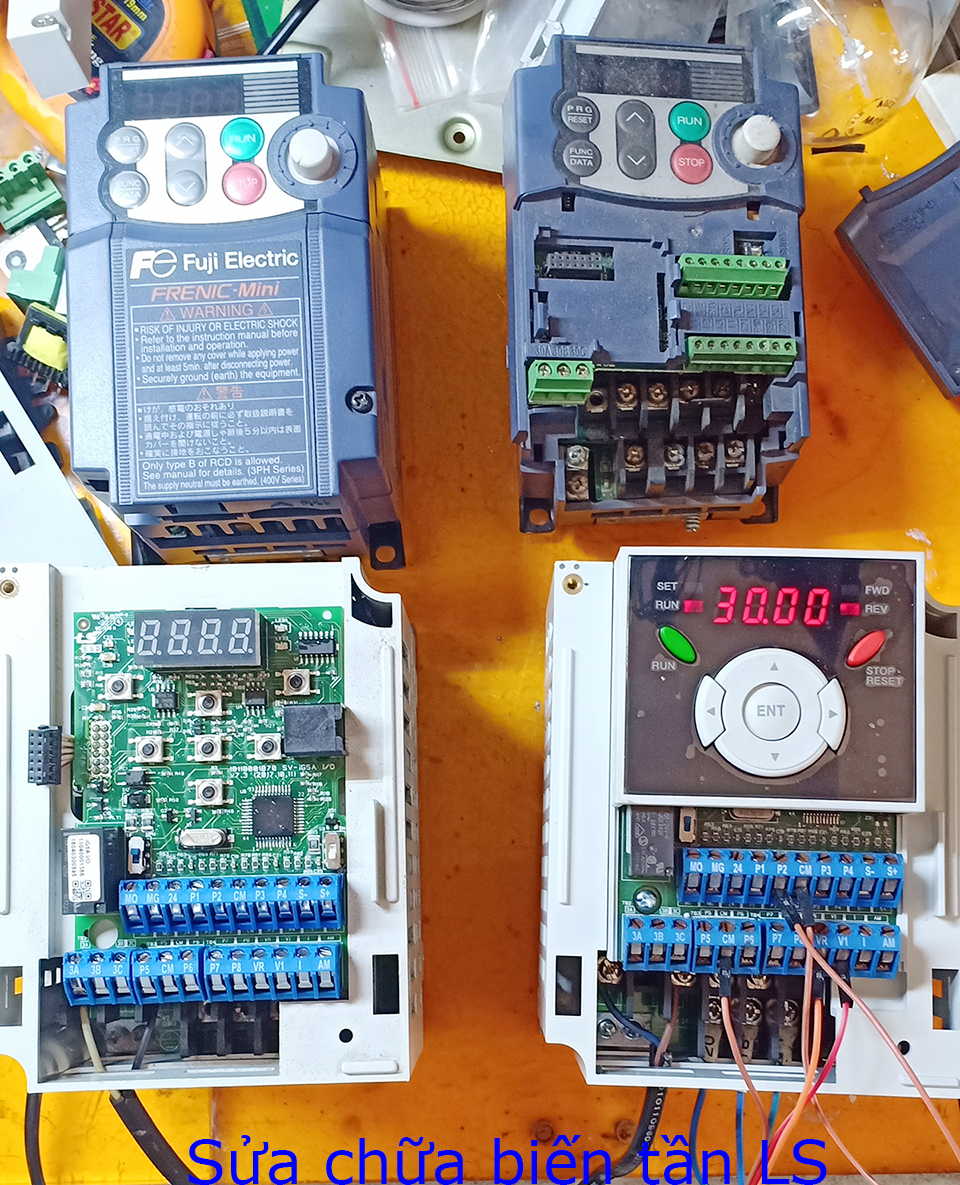
SỬA CHỮA BIẾN TẦN LS - SỬA CHỮA BIẾN TẦN IG5
Sửa chữa biến tần LS các dòng 0.75KW đến 37KW lỗi nguồn điều khiển, Nguồn Bus DC, hỏng công suất, hỏng chỉnh lưu, thấp áp, quá áp, lỗi quá dòng, lỗi lệch pha




SỬA CHỮA BIẾN TẦN YASKAWA - SỬA CHỮA BIẾN TẦN H1000
Sửa chữa biến tần yaskawa tại Đà Nẵng
Sửa chữa biến tần Yaskawa lỗi nguồn điều khiển, lỗi công suất, lỗi thấp áp, lỗi quá áp, lỗi quá dòng, lỗi lệch pha

SỬA CHỮA BIẾN TẦN ĐÀ NẴNG - SỬA CHỮA BIẾN TẦN LENZE
Sửa chữa biến tần Lenze tại Đà Nẵng

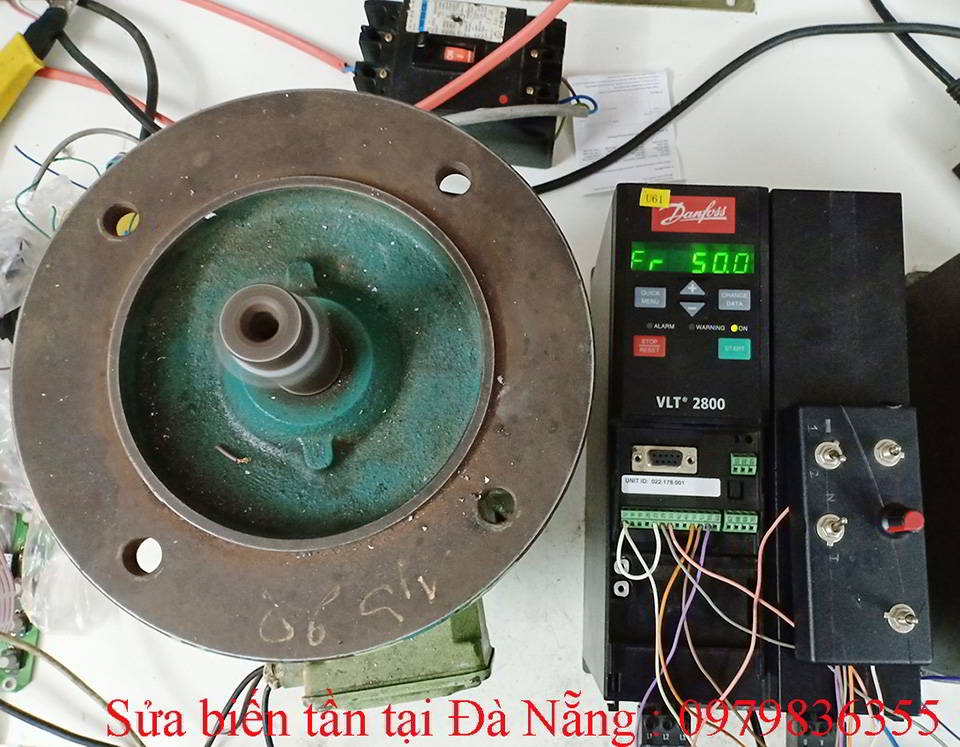
SỬA CHỮA BIẾN TẦN DANFOSS TẠI ĐÀ NẴNG
Sửa chữa biến tần danfoss
Sửa chữa biến tần Danfoss VLT2800, Sửa chữa biến tần Danfoss VLT2900
Sửa chữa biến tần Danfoss lỗi nguồn điều khiển, Nguồn Bus DC, hỏng công suất, lỗi thấp áp, lỗi quá áp, lỗi quá dòng, lỗi lệch pha


SỬA CHỮA BIẾN TẦN INVT
Sửa chữa biến tần INVT tại Đà Nẵng




SỬA CHỮA BIẾN TẦN NOWFOREVER
Sửa chữa biến tần Nowforever tại Đà Nẵng
SỬA CHỮA BIẾN TẦN SIEMENS TẠI ĐÀ NẴNG
Sửa chữa biến tần Siemens tại Đà Nẵng


SỬA CHỮA BIẾN TẦN SAJ
Sửa chữa biến tần SAJ tại Đà Nẵng
SỬA CHỮA BIẾN TẦN YOLICO
Sửa chữa biến tần Yolico tại Đà Nẵng


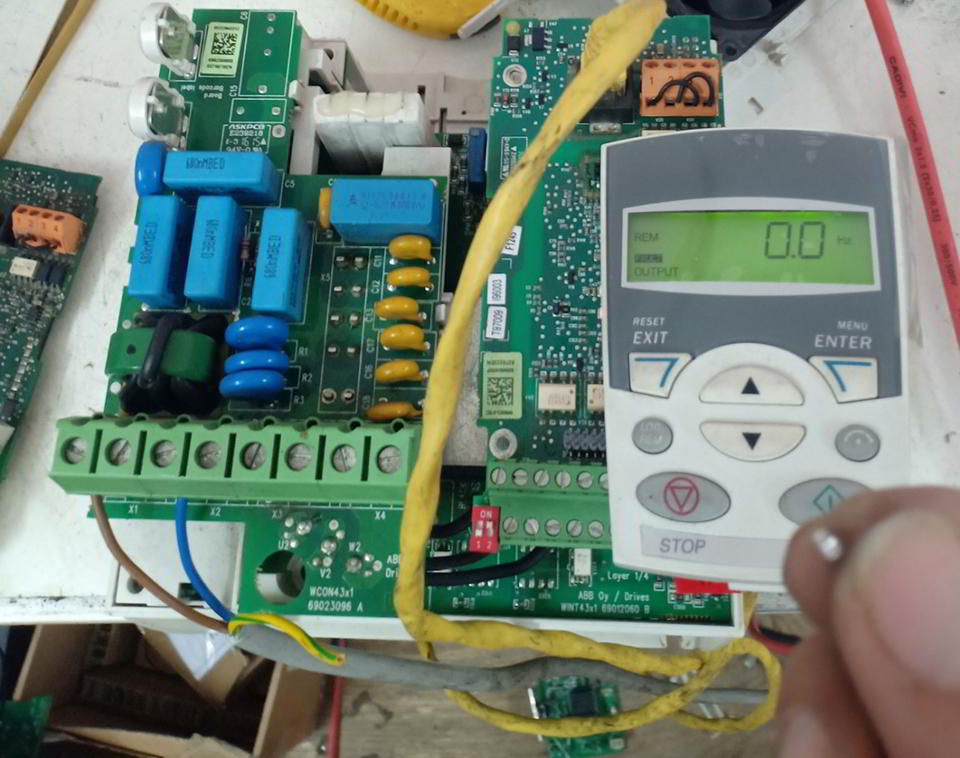
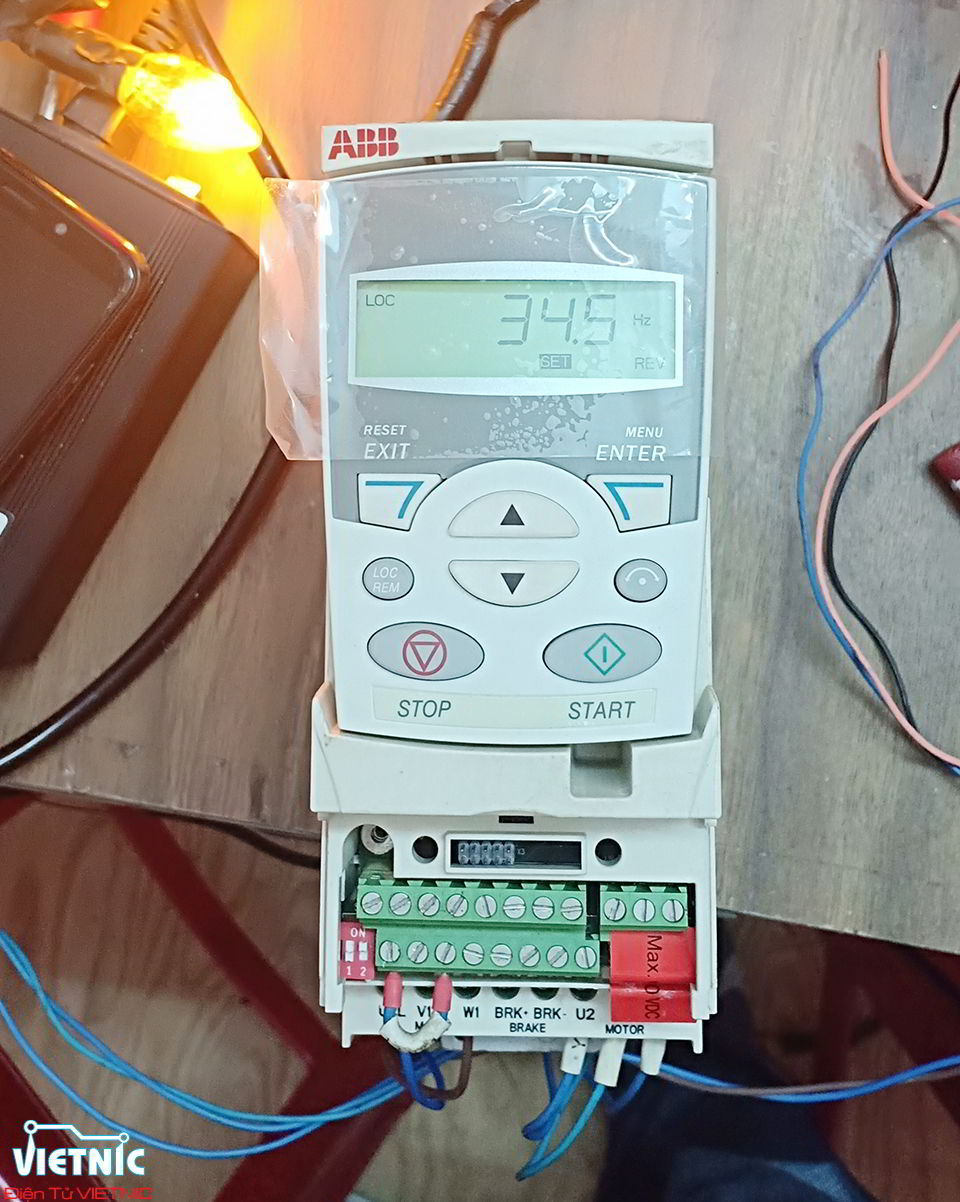
SỬA CHỮA BIẾN TẦN ABB TẠI ĐÀ NẴNG
Sửa chữa biến tần ABB
Sửa chữa biến tần ABB các dòng như ACS150, ACS355, ACS550 với công suất từ 0.75KW đến 132KW
SỬA CHỮA BIẾN TẦN ABB ACS800


SỬA CHỮA BIẾN TẦN ACS810



SỬA CHỮA BIẾN TẦN ACS510 ACS550


SỬA CHỮA BIẾN TẦN ACS355

SỬA CHỮA BIẾN TẦN ABB ACS550


SỬA CHỮA BIẾN TẦN ABB ACS150

SỬA CHỮA BIẾN TẦN HITACHI
Sửa chữa biến tần Hitachi SJ700


SỬA CHỮA BIẾN TẦN MITSHUBISHI
Sửa chữa biến tần Mitshubishi tại Đà Nẵng

SỬA CHỮA BIẾN TẦN FUJI




SỬA CHỮA BIẾN TẦN DELTA
Sửa chữa biến tần delta tại Đà Nẵng






SỬA CHỮA BIẾN TẦN INOVANCE
Sửa chữa biến tần Inovance tại Đà Nẵng

SỬA CHỮA BIẾN TẦN ALTIVAR SCHNEIDER
Sửa biến tần Altivar Schneider tại Đà Nẵng




SỬA CHỮA BIẾN TẦN VARISPEED
Sửa chữa biến tần Varispeed tại Đà Nẵng
Sửa chữa biến tần Varispess 616G5, Sửa chữa biến tần Varispeed 606PC3

SỬA CHỮA BIẾN TẦN MÁY CNC - BIẾN TẦN SPINDLE
Sửa chữa biến tần máy CNC tại Đà Nẵng

SỬA CHỮA BIẾN TẦN VEICHI

SỬA CHỮA BIẾN TẦN ALLEN-BRADLEY

SỬA CHỮA BIẾN TẦN PANASONIC
Sửa chữa biến tần Panasonic tại Đà Nẵng
ĐIỆN TỬ VIETNIC - SỬA CHỮA ĐIỆN TỬ, ĐIỆN TỬ CÔNG NGHIỆP
- Sửa chữa Biến tần, Servo driver, UPS, Máy hàn, Nguồn chuyên dụng, Sạc ắc quy, Inverters, PLC, HMI, Driver Controllers, DCS, Máy may, Thiết bị công nghiệp....
- Thiết kế mạch, lập trình theo yêu cầu các mạch ứng dụng
- Tư vấn, thiết kế tủ điện. Bảo trì thiết bị sản xuất tự động, Máy NC, CNC, Phay, Tiện, Máy đúc, Máy ép, Dập....
* Với đội ngũ là Kỹ Sư, Cử Nhân chuyên ngành Điện Tử, Cơ Điện Tử, Tự Động Hóa.., có kinh nghiệm tích lũy trong quá trình sửa chữa, cũng như thiết kế, Chúng tôi hy vọng sẽ đáp ứng được và mang lại hiệu quả cao nhất đến với quý khách hàng.
Thông tin liên hệ :
- Điện Tử VIETNIC
- Địa chỉ : 816 Tôn Đức Thắng, P. Hòa Khánh, Q. Liên Chiểu, TP. Đà Nẵng
- SĐT : 0979245175
Sản phẩm cùng loại

MODULE DÒ LINE NEWWAY BFD-1000
48.000₫
LCD1602 KEYPAD SHIELD
64.000₫
SALE
XE ROBOT 4 BÁNH ĐIỀU KHIỂN BẰNG BLUTOOTH - XE ĐIỀU KHIỂN
620.000₫
650.000₫
MODULE SẠC KHÔNG DÂY 5W 1A
85.000₫

{kind=link}
{kind=link}